Ze Pupuce Project ![]()
Collectif "La Puce à l'Oreille"
Mat & Scab
Ce projet est né en 2002 de l'envie de réaliser des performances et installations alliant sons et autres sensations d'une manière interactive.
Nous avons donc mis au point une petite carte à base de microprocesseur, modulable facilement pour en faire un convertisseur/conditionneur de capteurs générant des signaux MIDI.
Les signaux ainsi récupérrés pourront être interprétés par une chaine MIDI de différents périphériques : synthés, sampleurs, filtres, effets, ordinateurs, consoles de mixage, ...
Avec un ordinateur il est possible d'utiliser la carte comme interface avec des logiciels comme Pure Data, afin de créer des scénari interactifs complexes, alliant sons, images, video, ou autres périphériques...
Le Cerveau:
Notre choix c'est vite porté sur le micro-controleur 68HC11.
Celui ci comporte des convertisseurs analogiques-numérique, des fonctionnalités de timers et une cadence idéale pour une machine temps réel, assez courant et économique, facile à mettre en oeuvre avec des composants discrets traditionnels, sur circuit imprimé simple face.
La puissance du 68HC11 choisit permet d'implémenter un système d'exploitation temps réel (RebeccaOS, créé par Thomas Duval pour donner l'"intelligence artificielle" à des robots)
Un compilateur est intégré, ce qui permet de programmer des processus complexe avec un language specifique, simple et évolué, à l'aide d'une simple liaison RS232 à un terminal ou émulateur.
L'assembleur 6800 n'est donc utilisé que pour les couches primaires (drivers des différentes interfaces connectées) ou très critiques en terme de latence (CAN, gestion des interruptions...)
Mais on s'en est quand même cogné pas mal de l'assembleur quel bonheur !!! S-8
Les ressources:
68HC11F1 Product Summary Page
68HC11 Applications - sharp
68HC11 Assembly
Le microcontroleur 68HC11 de MOTOROLA Interfaces et Capteurs TOUT ! en anglais
Interface-Z Capteurs, actionneurs, interfaces Midi pour interaction à distance, art contemporain et modélisme.
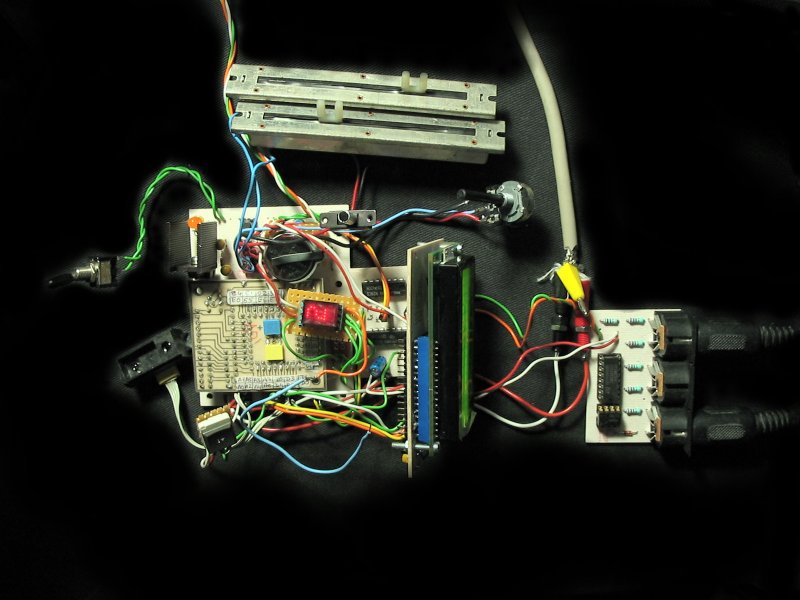
2002 : On commence par étude, conception des cartes electroniques, réalisation des circuits imprimés... Tests douloureux des débuts, on se calme, étape par étape, ... hardware ok... os ok... interfaces ok... drivers ok... programmes ok... 2003 : Une vue du prototype:
Plusieurs types d'interfaces y sont connectées (un peu sauvage !)
2004 : On commence à imaginer une application de la carte qui permette de servir de "couteau suisse" et de tester la stabilité d'un ensemble complexe.
La boite de Pupuce I est choisie pour fabriquer un instrument capable de générer en temps réel des messages midi captés par 4 potentiomètres rectilignes, 4 rotatifs, 2 télémètres à infrarouge et des boutons configurable, une interface utilisateur avec clavier de navigation et écran LCD, accès à un menu permettant de configurer la machine
Après beaucoup d'usinage, de peinture et de sueur ...

On y loge la carte mère, les capteurs, la carte MIDI et navigation/LCD
Premiers messages MIDI reçu... grande émotion !
Ici on voit REAKTOR (synthé virtuel) qui tourne, avec MIDI OX à côté pour valider les messages MIDI, les cadences d'envoi et la latence du système, qui s'avère exceptionnellement faible (entre 0,4 et 4 ms suivant la priorité des processus)

Les essais : ça joue !

Le plus dur est le calage des capteurs de distance infra rouge, aller ! un peu d'optique maintenant... Bientôt sur scène ?

8 canaux de capteurs analogiques sont facilement externalisable par 8 jacks d'inserts, on dispose aussi d'un connecteur d'extension avec un port 8 bit E/S, 2 entrées capteurs tout/rien avec gestion d'interuption, alimentation régulée indépendante +5v disponible (limitée par protection à 1A, utilisée comme tension de référence pour les CAN)

2005 : Eh oui, en plus de faire tous ces sons inouis, elle parle ! (-; Bon c'est juste qu'elle s'ennuie un peu en ce moment...